AGV激光导航避障传感装置基于二维激光雷达扫描技术,实现避障功能,结合嵌入SLAM导航算法的激光导航模块实现无轨自主导航的目的。该传感装置因其小巧的外观设计,可定制的参数,在众多AGV应用领域均有不俗的表现,如重载AGV、智能送餐车、潜伏顶升式AGV、安防巡线机器人、背负牵引式AGV等。

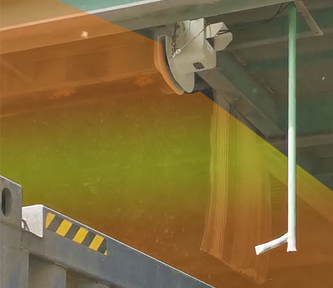
实现矿卡位置实时检测、料位高度实时检测等功能,为后端PLC系统提供实时可靠的测量数据,实现装车流程的自动化、无人化。

采用先进的激光雷达测量技术及应用算法,实现电机车位置实时检测、料位高度实时检测、自动分车、车厢计数、行驶方向判断、车头识别等功能。
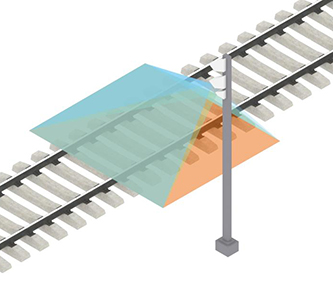
采用先进的激光雷达测量技术及应用算法,实现列车位置实时检测、料位高度实时检测、自动分车、车厢计数、行驶方向判断、车头识别等功能。

采用三维激光扫描技术及应用算法,完成测量目标三维扫描成像、天车防碰撞、天车定位等位置,为后端PLC系统提供实时可靠的测量数据。

方案通过激光雷达及相关算法,可在矿车工作过程中实时监测前方路况,辅助列车控制系统进行减速或停车,避免发生安全事故。
COPYRIGHT © 1997-2021保定市天河电子技术有限公司 ALL RIGHTS RESERVED 冀ICP备05000380号-1 DESIGN BY SZHD